Publications
Selected publications are listed below.
For a complete and up-to-date record, please see my Google Scholar profile.
View full list on Google Scholar ↗
Journal Papers

TRANSACTIONS ON ROBOTICS · 2025
Sqrt-VINS: Robust and Ultrafast Square-Root Filter-based 3D Motion Tracking
Yuxiang Peng, Chuchu Chen, and Guoquan Huang
IJRR · 2024
Fast and Robust Learned Single-View Depth-aided Monocular Visual-Inertial Initialization
Nathaniel Merrill,
Patrick Geneva,
Saimouli Katragadda,
Chuchu Chen,
and Guoquan Huang
JOURNAL OF FIELD ROBOTICS · 2023
MINS: Efficient and Robust Multisensor-aided Inertial Navigation System
Woosik Lee,
Patrick Geneva,
Chuchu Chen,
and Guoquan Huang
RA-L · 2020
Analytic Combined IMU Integration (ACI²) for Visual-Inertial Navigation
Yulin Yang,
Benzun Pious Wisely Babu,
Chuchu Chen,
Guoquan Huang,
and Liu Ren
Conference Papers
ICRA · 2025
Is Iteration Worth It? Revisit Its Impact in Sliding-Window VIO
Chuchu Chen, Yuxiang Peng, and Guoquan Huang
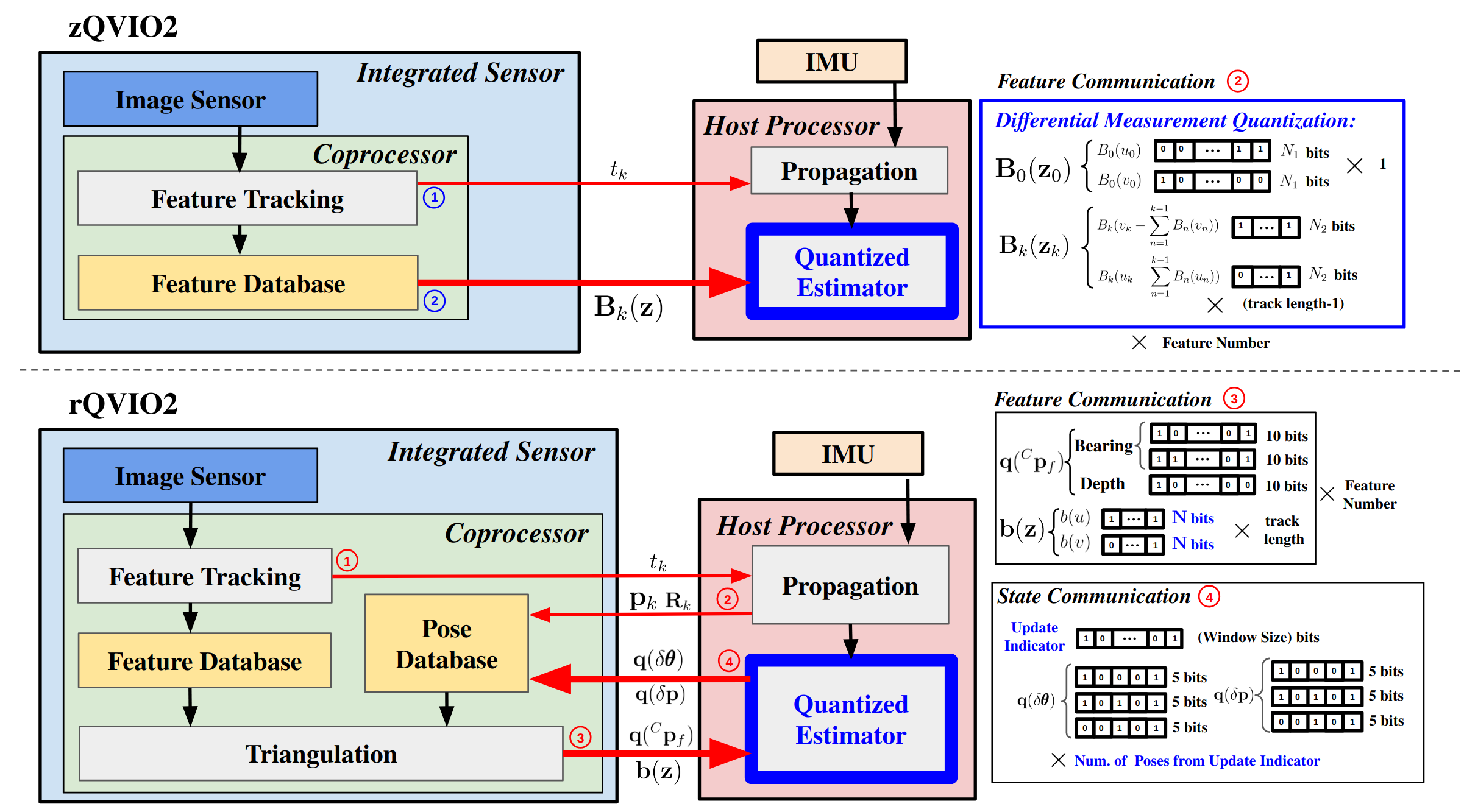
ICRA · 2025
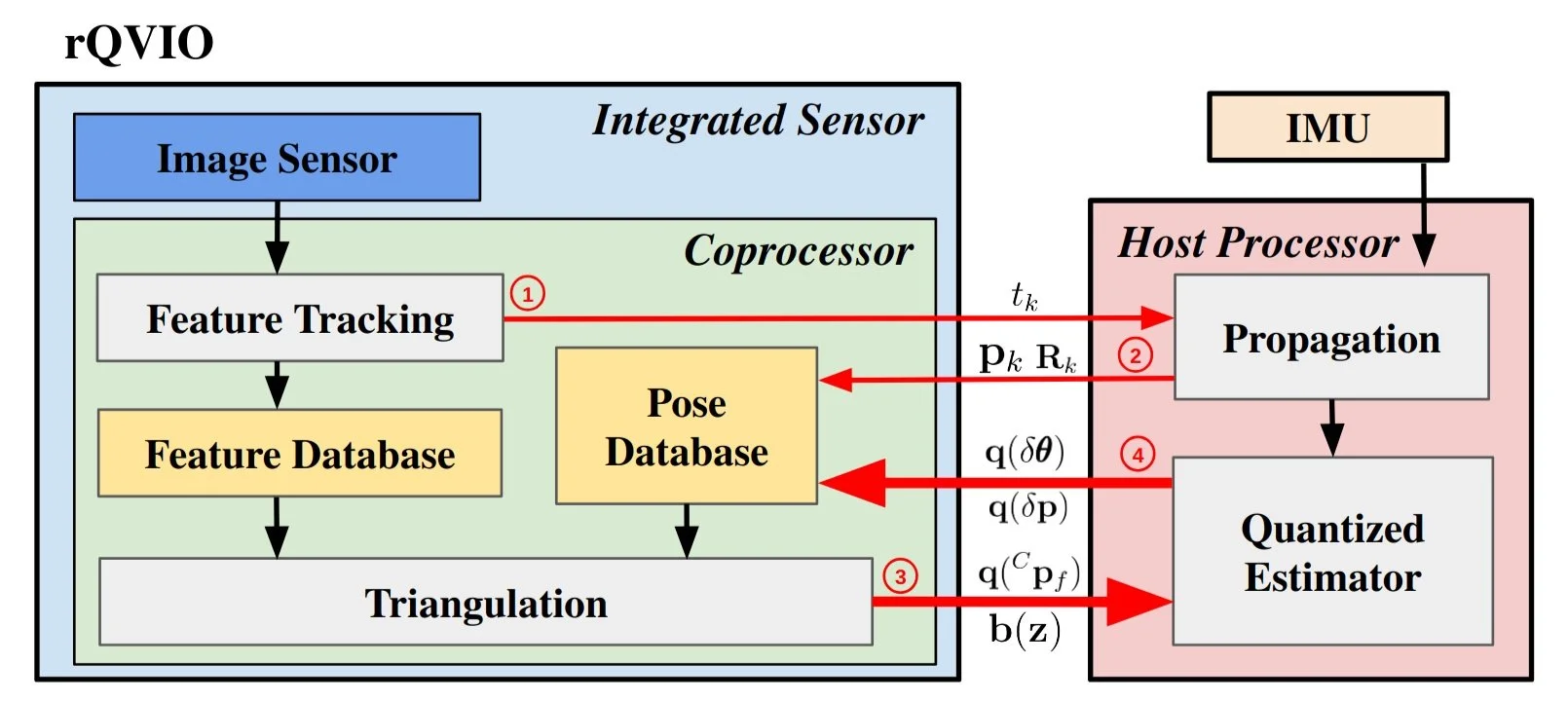
QVIO2: Quantized MAP-based Visual-Inertial Odometry
Yuxiang Peng, Chuchu Chen, and Guoquan Huang
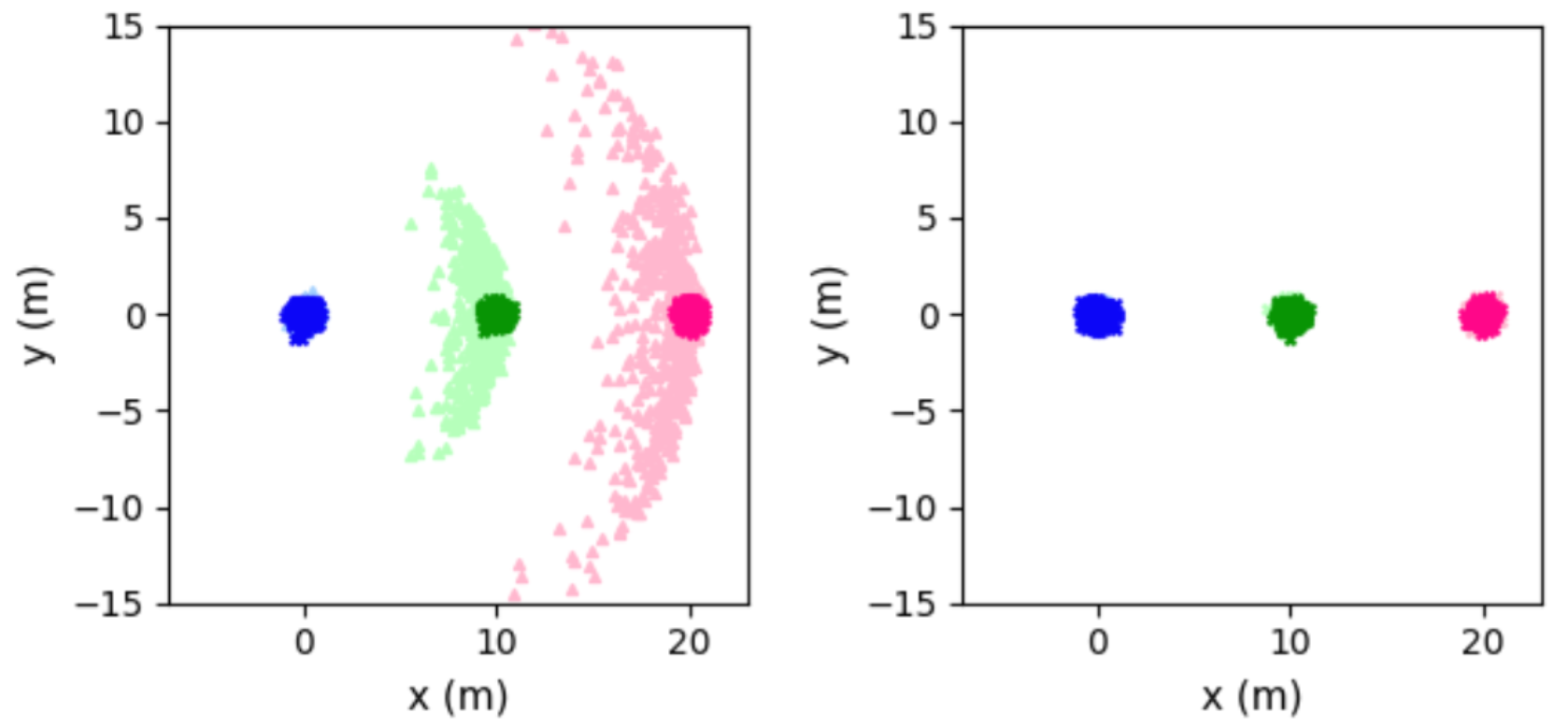
WAFR · 2024
Visual-Inertial State Estimation with Decoupled Error and State Representations
Chuchu Chen, Yuxiang Peng, and Guoquan Huang
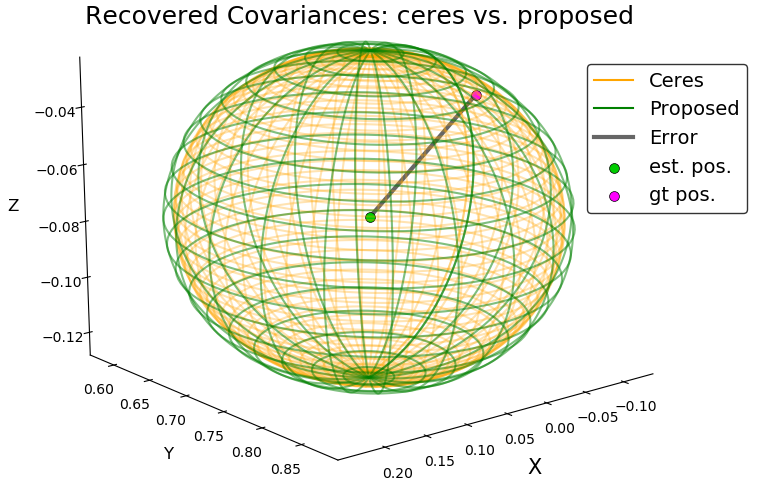
ICRA · 2024
Fast and Consistent Covariance Recovery for Sliding-Window Optimization-based VINS
Chuchu Chen, Yuxiang Peng, and Guoquan Huang
ICRA · 2024
Best Paper Award Finalist (Robot Vision)
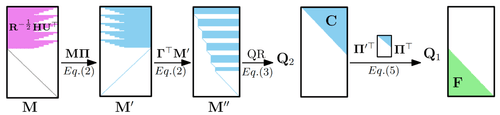
Ultrafast Square-Root Filter-based VINS
Yuxiang Peng, Chuchu Chen, and Guoquan Huang

ICRA · 2024
NeRF-VINS: A Real-time Neural Radiance Field Map-based Visual-Inertial Navigation System
Saimouli Katragadda, Woosik Lee, Yuxiang Peng, Patrick Geneva,
Chuchu Chen,
Chaoyang Guo, Mingyang Li, and Guoquan Huang
IROS · 2022
Visual-Inertial-Aided Online MAV System Identification
Chuchu Chen*, Yulin Yang*, Patrick Geneva, Woosik Lee, and Guoquan Huang
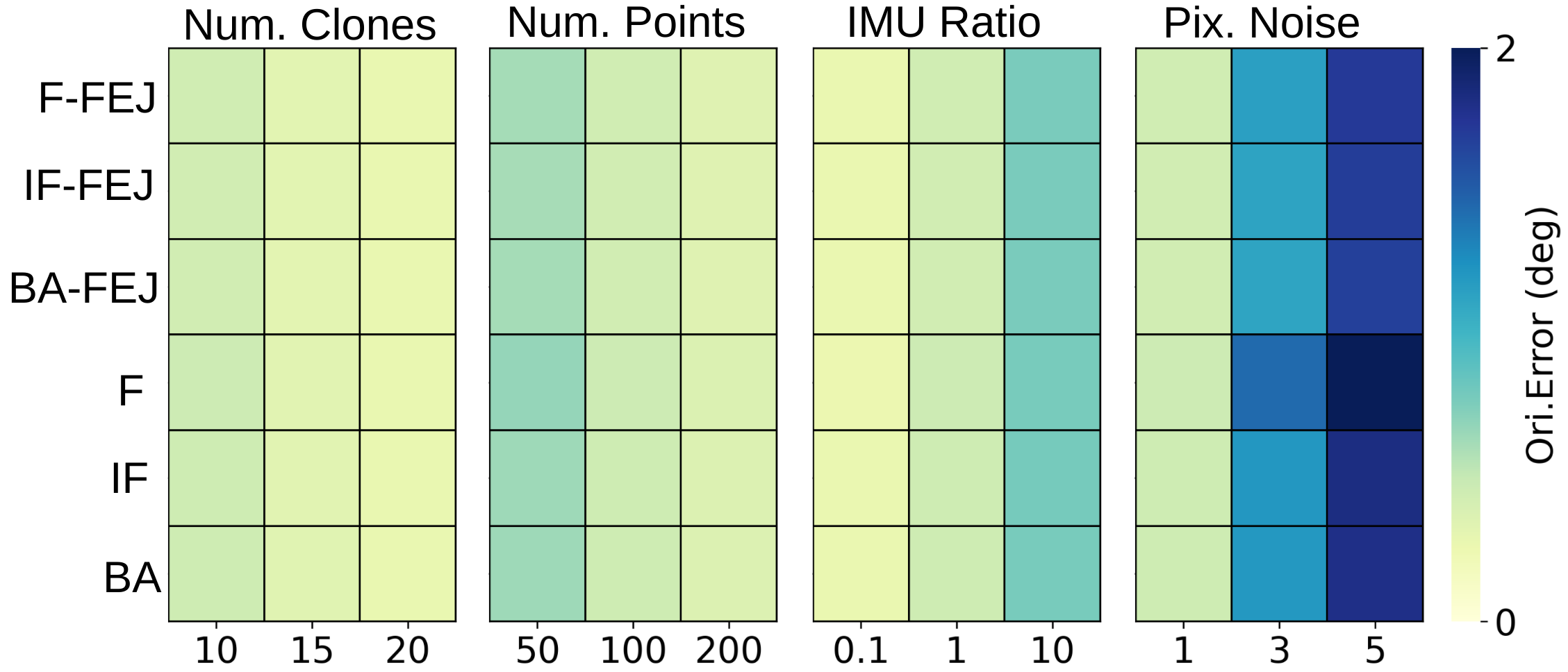
ICRA · 2022
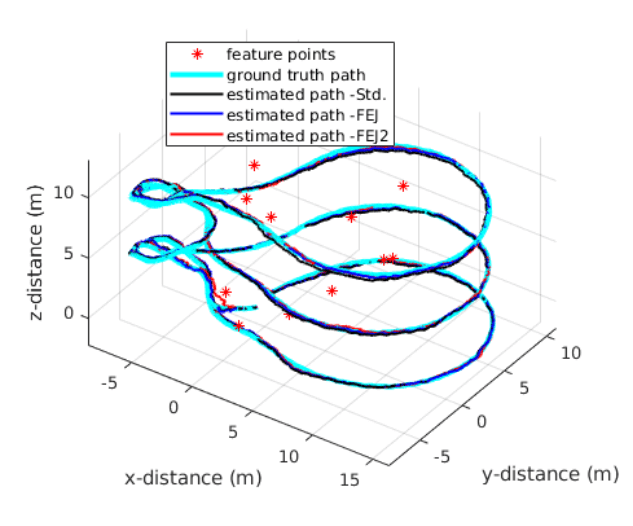
FEJ2: A Consistent Visual-Inertial State Estimator Design
Chuchu Chen, Yulin Yang, Patrick Geneva, and Guoquan Huang